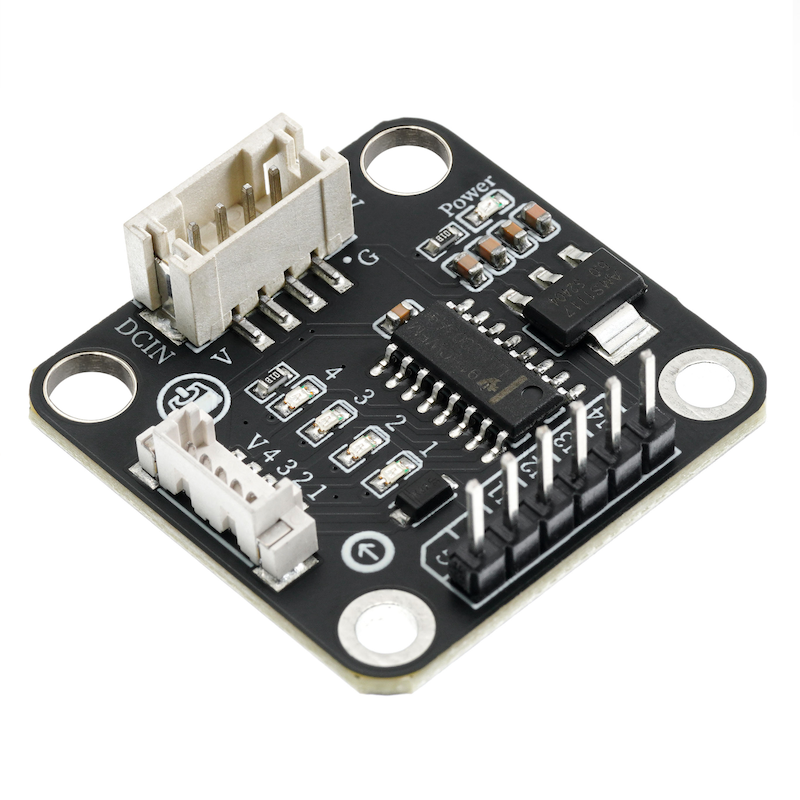
1、Einführung
Dieses ULN2003A ist ein hoher Spannungs-, großer Strom-Darlington-Trafo-Array, das oft zur Ansteuerung von Relais, LED-Leuchten, Ventilen und Schrittmotoren verwendet wird.Es gibt sieben unabhängige Kanäle, die die vier Windungen des Schrittmotors getrennt steuern können. Jeder Kanal kann bis zu 500mA Strom aufnehmen, was ausreicht, um kleine bis mittlere Schrittmotoren anzutreiben.Dieser Treiber wird durch ULN2003A zur Steuerung eines 5-Leiter-4-Phasen-Schrittmotors verwendet.Der Kern des Antriebs der Schrittmotoren besteht darin, die Rotation des Motors durch Ändern der Stromreihenfolge und -sequenz der Motorwicklungen zu erreichen.ULN2003A jeder Kanal entspricht einem Spulenkreis des Schrittmotors. Durch die Kontrolle der Öffnung und Schließung dieser Kanäle können wir die Schrittbewegung des Motors steuern.Normalerweise haben Schrittmotoren vier verschiedene Schrittmodi: Einphasen-, Zweiphasen-, Halbschritt- und Vollschrittmodus. In jedem Modus variiert der Drehmoment und die Genauigkeit des Motors.
2、Schemazeichnung
ULN2003-Schrittmotorsteuermodul-HS-F25-PL-SchemaKlicken Sie zum Anzeigen
3、Modulparameter
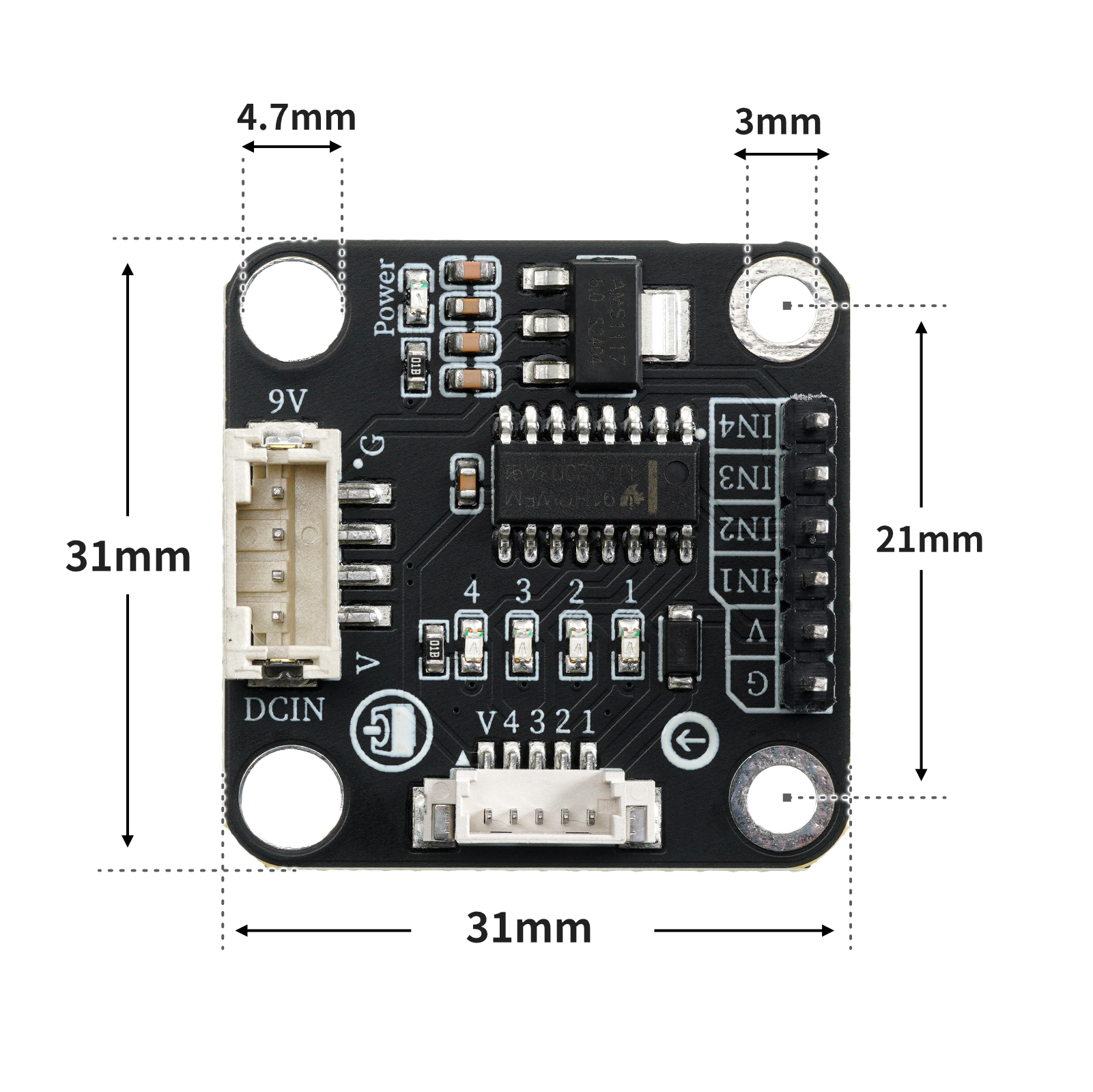
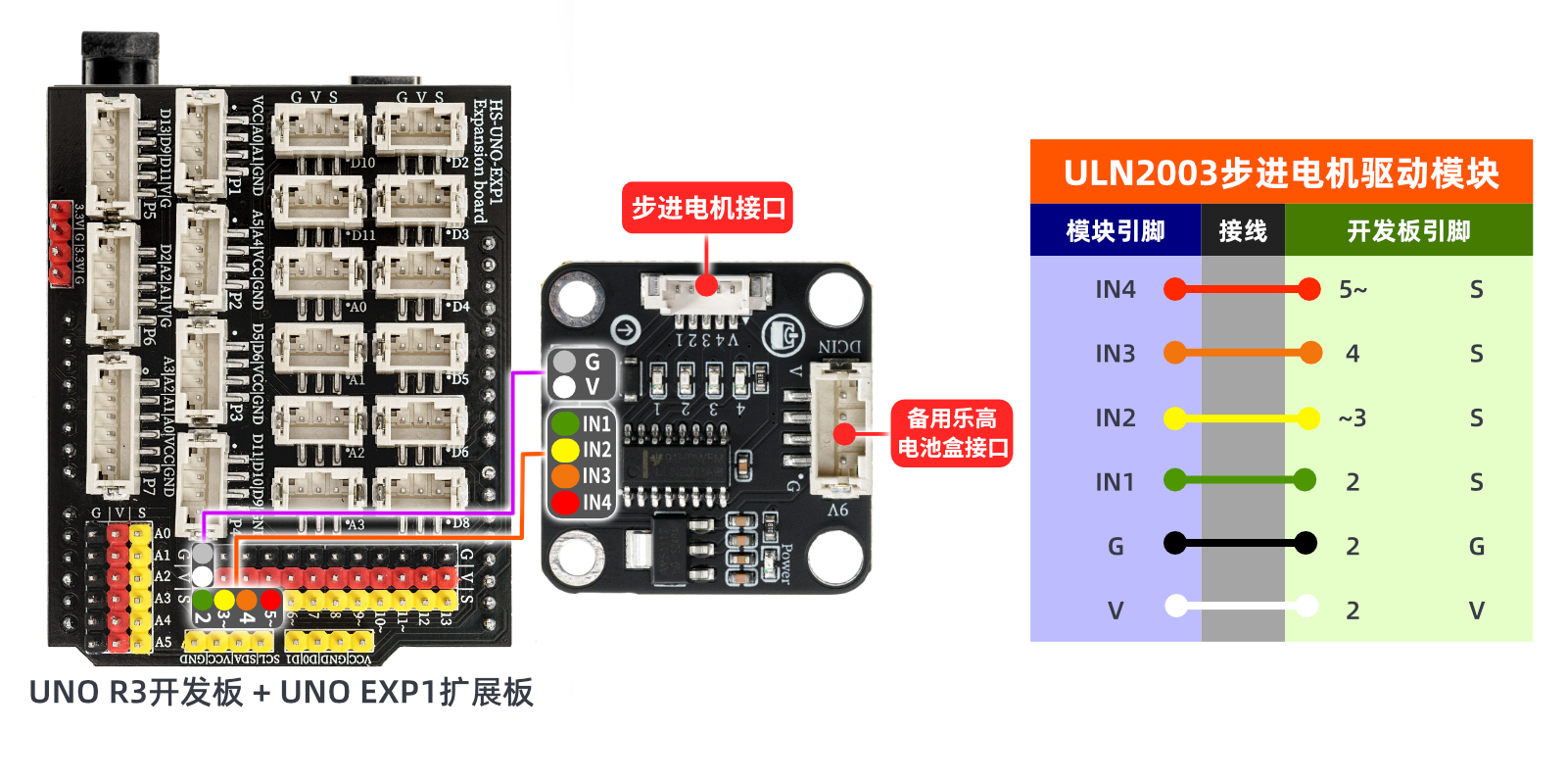
Pinbezeichnung | Beschreibung |
|---|---|
G | GND(Spannungsversorgungsminus) |
V | VCC(Spannungsversorgungsplus) |
IN1 | Motor-Signal-Leitung 1 |
IN2 | Motor-Signal-Leitung 2 |
IN3 | Motor-Signal-Leitung 3 |
IN4 | Motor-Signal-Leitung 4 |
Versorgungsspannung: 5V
Stromsignalverbindungsmethode: 6P DuPont-Kabel
Schrittmotorverbindungsmethode: PH1.5-4P Stecker
Installationsart: Schraubenmontage / Lego-Bauweise
4, Platinegröße
5、Arduino IDE Beispielprogramm
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
Anleitung zum Herunterladen und Importieren der Bibliotheksdateien für das Arduino IDE:Klicken Sie zum Anzeigen
Beispielprogramm (UNO-Entwicklerboard):
#include <Stepper.h>
Stepper mystepper(2048,2,3,4,5);
void setup(){
mystepper.setSpeed(10);
}
void loop(){
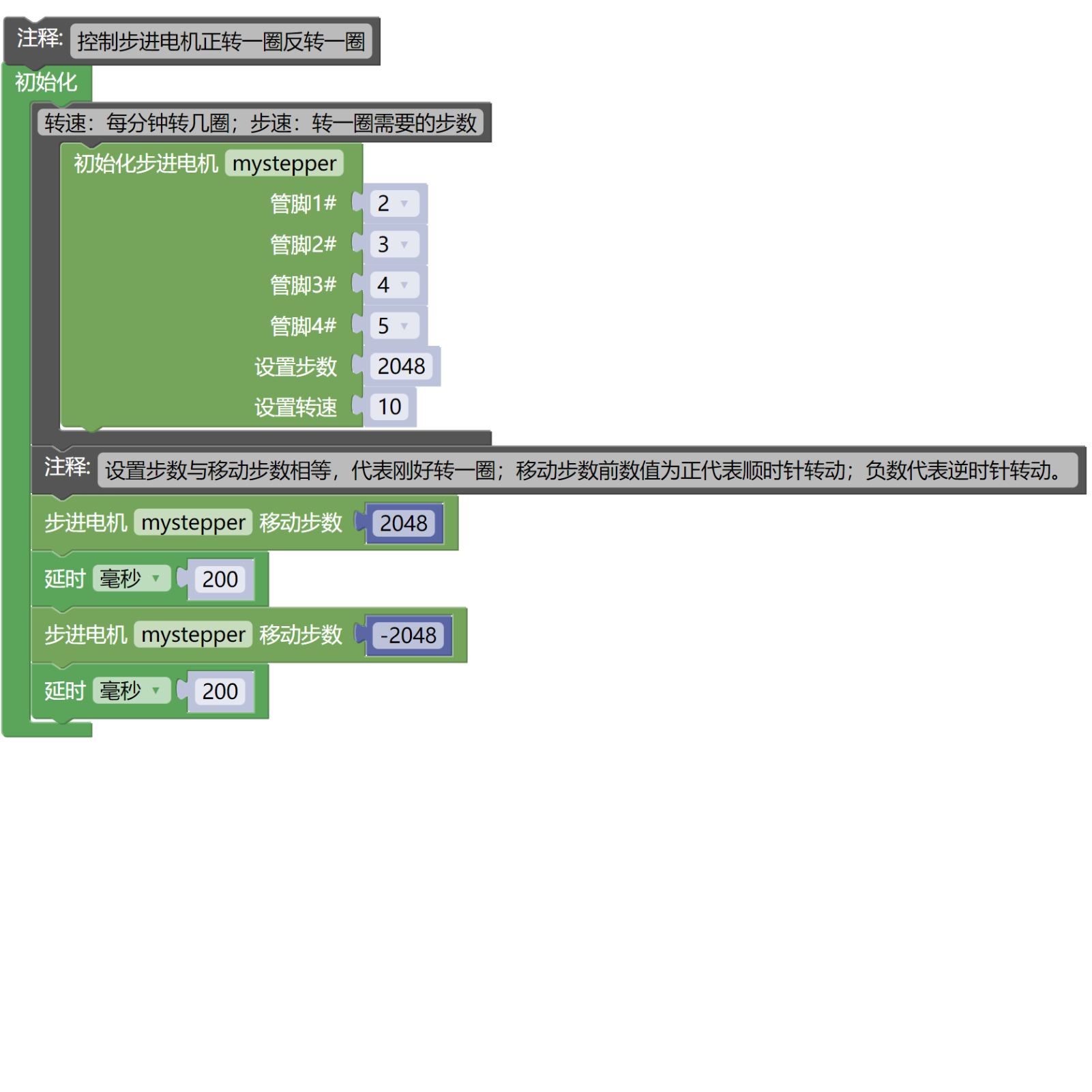
//控制步进电机正转一圈反转一圈
//设置步数与移动步数相等,代表刚好转一圈;移动步数前数值为正代表顺时针转动;负数代表逆时针转动。
mystepper.step(2048);
delay(200);
mystepper.step((-2048));
delay(200);
}6、ESP32 Python Beispiel (für Mixly IDE /米思齐)
Entwicklungsboard auswählen Python ESP32 [ESP32 Generic(4MB)] auf den Code-Modus umschalten und hochladen
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
示例程序(ESP32-Python):
待更新...7、米思齐 Mixly 示例程序(图形化语言) in Deutsch
Beispielprogramm (UNO-Board):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE Arduino库文件下载及导入教程:Klicken Sie zum Anzeigen
Beispielprogramm (ESP32-Entwicklungsboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
Bilder müssen aktualisiert werden...
8、Testumgebung Einrichtung
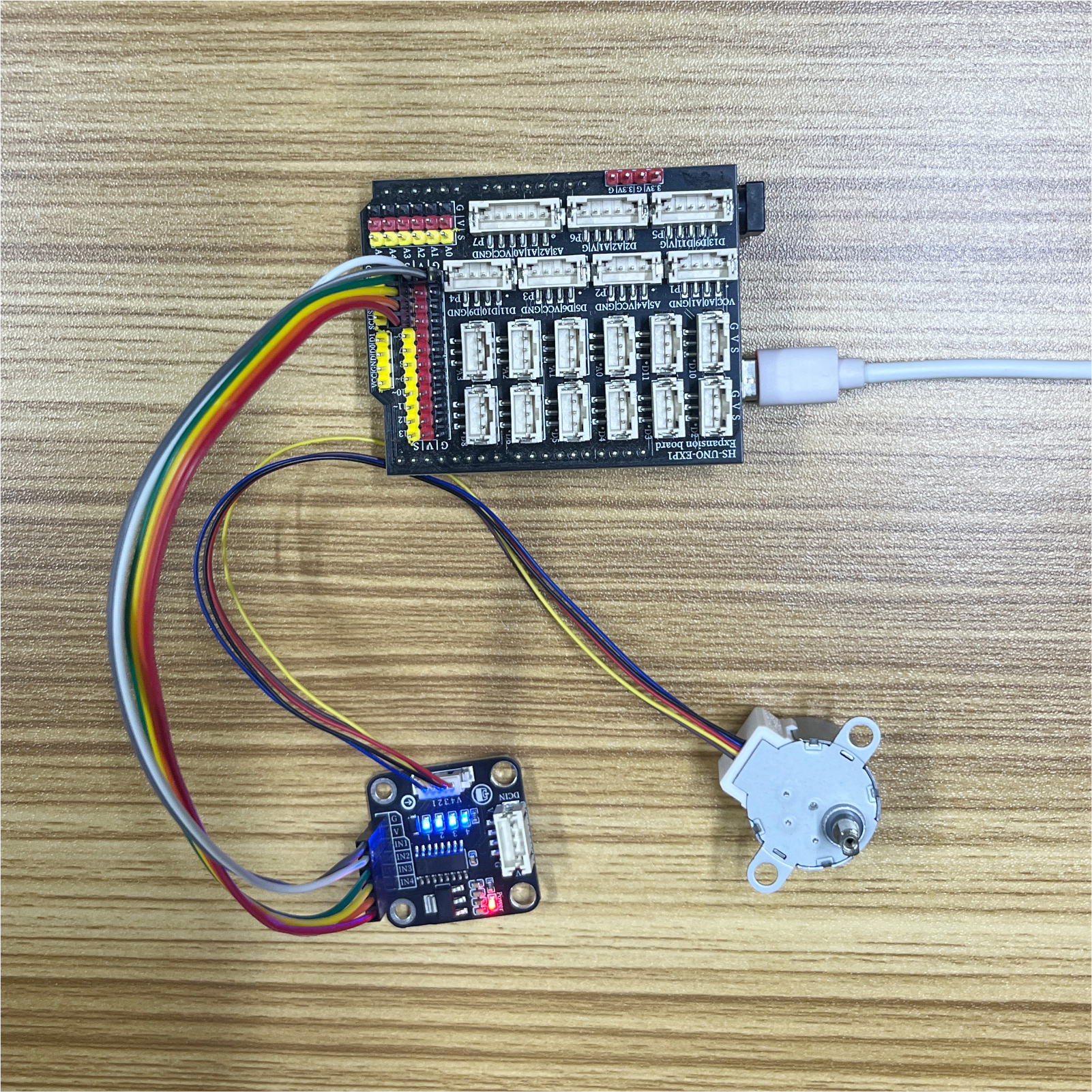
Testumgebung für Arduino UNO einrichten
Vorbereiten Sie die Komponenten:
UNO-R3 Entwicklungsboard *1
UNO-R3 P Erweiterungsplatine *1
USB type-c Datenkabel *1
Schrittmotorsteuermodul (HS-F25-PL) *1
6P杜邦线*1
PH1.5-4P线
Schaltplan der Leitung:
ESP32 Testumgebung einrichten
Vorbereiten Sie die Komponenten:Wird aktualisiert...
Schaltplan der Leitung:Wird aktualisiert...
9、Video-Tutorial
Arduino UNO Videoanleitung:Klicken Sie zum Anzeigen
ESP32 Python Videoanleitung:Klicken Sie zum Anzeigen
10、Testergebnis
Arduino UNO Testergebnis:
Programm nach dem Flashen beobachten, der Motor dreht sich um eine Umdrehung, pausiert kurz und dreht sich umgekehrt.