1、Einführung
Bordnetzverwaltung: Es wird in der Regel ein Stromanschluss integriert, um dem angeschlossenen Motor und dem Chip selbst angemessenen Strom bereitzustellen.Ein Teil der Erweiterungsplatten verfügt auch über einen Entgegengewärtsschutzschalter, um Schäden am电路 durch falsches Anschließen der Polen des Stromversorgers zu verhindern.
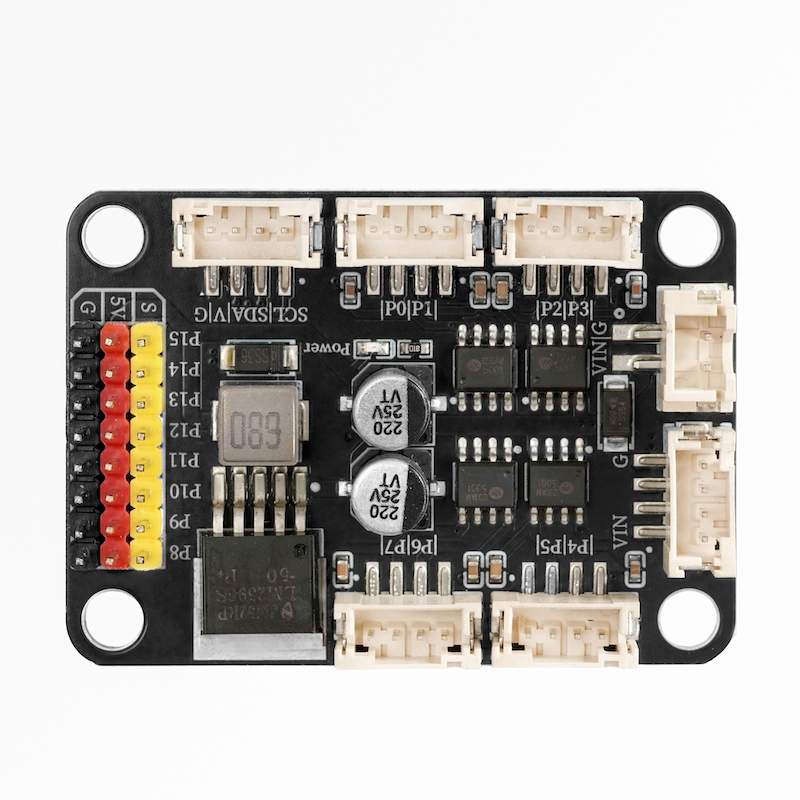
2、Schemazeichnung
PCA9685-I2C-4-Wege-MOC-PF-Motor-8PIN- Erweiterungsplatine-HS-F27-LKlicken Sie zum Anzeigen
3、Modulparameter
Pinbezeichnung | Beschreibung |
|---|---|
G | GND(Spannungsversorgungsminus) |
V | VCC(Spannungsversorgungsplus) |
SDA | Datenpin |
SCL | Zeitpin |
Spannungsversorgung: 3.3V-5V
Verbindungsmethode: PH2.0 4P Steckerkabel
Montagemethode: Lego-Baukasten
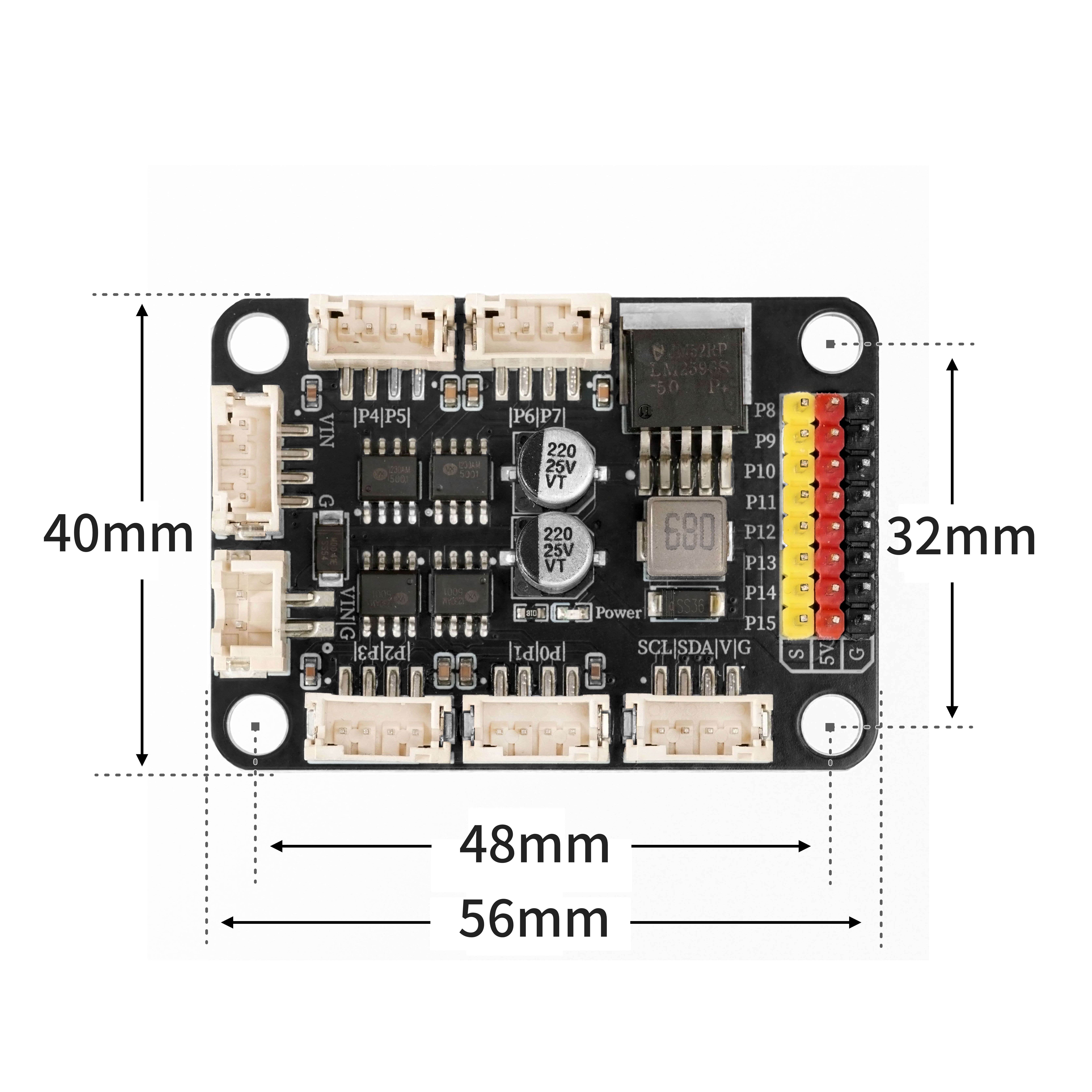
4, Platinegröße
5、Arduino IDE Beispielprogramm
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
Anleitung zum Herunterladen und Importieren der Bibliotheksdateien für das Arduino IDE:Klicken Sie zum Anzeigen
Beispielprogramm (UNO-Entwicklerboard):
#include "Wire.h"
#include "Adafruit_PWMServoDriver.h"
Adafruit_PWMServoDriver PWM = Adafruit_PWMServoDriver(0x40);
void setup(){
PWM.begin();
PWM.setPWMFreq(85);
}
void loop(){
PWM.setPWM(0,0,0);
PWM.setPWM(1,0,2048);
PWM.setPWM(2,0,0);
PWM.setPWM(3,0,2048);
PWM.setPWM(4,0,0);
PWM.setPWM(5,0,2048);
PWM.setPWM(6,0,0);
PWM.setPWM(7,0,2048);
for (int i = 0; i <= 180; i = i + (1)) {
PWM.setPWM(8,0,(map(i, 0, 180, 140, 680)));
PWM.setPWM(9,0,(map(i, 0, 180, 140, 680)));
PWM.setPWM(10,0,(map(i, 0, 180, 140, 680)));
PWM.setPWM(11,0,(map(i, 0, 180, 140, 680)));
delay(50);
}
}6、ESP32 Python Beispiel (für Mixly IDE /米思齐)
Entwicklungsboard auswählen Python ESP32 [ESP32 Generic(4MB)] auf den Code-Modus umschalten und hochladen
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
示例程序(ESP32-Python):
from machine import I2C, Pin
import time
from mixpy import math_map
PCA9685_MODE1 = 0x00
PCA9685_MODE2 = 0x01
PCA9685_LED0_ON_L = 0x06
PCA9685_LED0_ON_H = 0x07
PCA9685_LED0_OFF_L = 0x08
PCA9685_LED0_OFF_H = 0x09
PCA9685_ALLLED_ON_L = 0xFA
PCA9685_ALLLED_ON_H = 0xFB
PCA9685_ALLLED_OFF_L = 0xFC
PCA9685_ALLLED_OFF_H = 0xFD
PCA9685_PRESCALE = 0xFE
MODE1_ALLCAL = 0x01
MODE1_SUB3 = 0x02
MODE1_SUB2 = 0x04
MODE1_SUB1 = 0x08
MODE1_SLEEP = 0x10
MODE1_AI = 0x20
MODE1_EXTCLK = 0x40
MODE1_RESTART = 0x80
MODE2_OUTNE_0 = 0x01
MODE2_OUTNE_1 = 0x02
MODE2_OUTDRV = 0x04
MODE2_OCH = 0x08
MODE2_INVRT = 0x10
PCA9685_I2C_ADDRESS = 0x40
FREQUENCY_OSCILLATOR_HZ = 25_000_000
PRESCALE_MIN = 3
PRESCALE_MAX = 255
class PCA9685:
def __init__(self, i2c: I2C, addr: int = PCA9685_I2C_ADDRESS):
self.i2c = i2c
self.addr = addr
self._oscillator_freq = FREQUENCY_OSCILLATOR_HZ
def _write8(self, reg: int, val: int):
self.i2c.writeto_mem(self.addr, reg, bytes([val & 0xFF]))
def _read8(self, reg: int) -> int:
return self.i2c.readfrom_mem(self.addr, reg, 1)[0]
def _write4(self, base_reg: int, on: int, off: int):
buf = bytearray(4)
buf[0] = on & 0xFF
buf[1] = (on >> 8) & 0x0F
buf[2] = off & 0xFF
buf[3] = (off >> 8) & 0x0F
self.i2c.writeto_mem(self.addr, base_reg, buf)
def begin(self):
self.reset()
mode1 = self._read8(PCA9685_MODE1)
self._write8(PCA9685_MODE1, mode1 | MODE1_AI)
self.set_output_mode(True)
def reset(self):
self._write8(PCA9685_MODE1, MODE1_RESTART) # 写 RESTART
time.sleep_ms(10)
def sleep(self):
m1 = self._read8(PCA9685_MODE1)
self._write8(PCA9685_MODE1, m1 | MODE1_SLEEP)
time.sleep_ms(5)
def wakeup(self):
m1 = self._read8(PCA9685_MODE1)
self._write8(PCA9685_MODE1, m1 & (~MODE1_SLEEP))
time.sleep_ms(5)
def set_output_mode(self, totempole: bool = True):
m2 = self._read8(PCA9685_MODE2)
if totempole:
m2 |= MODE2_OUTDRV
else:
m2 &= ~MODE2_OUTDRV
self._write8(PCA9685_MODE2, m2)
def set_oscillator_frequency(self, freq_hz: int):
self._oscillator_freq = int(freq_hz)
def get_oscillator_frequency(self) -> int:
return self._oscillator_freq
def set_pwm_freq(self, freq_hz: float):
if freq_hz < 1.0:
freq_hz = 1.0
if freq_hz > 3500.0:
freq_hz = 3500.0
prescaleval = ((self._oscillator_freq / (freq_hz * 4096.0)) + 0.5) - 1.0
if prescaleval < PRESCALE_MIN:
prescaleval = PRESCALE_MIN
if prescaleval > PRESCALE_MAX:
prescaleval = PRESCALE_MAX
prescale = int(prescaleval)
oldmode = self._read8(PCA9685_MODE1)
newmode = (oldmode & ~MODE1_RESTART) | MODE1_SLEEP
self._write8(PCA9685_MODE1, newmode)
self._write8(PCA9685_PRESCALE, prescale)
self._write8(PCA9685_MODE1, oldmode)
time.sleep_ms(5)
self._write8(PCA9685_MODE1, oldmode | MODE1_RESTART | MODE1_AI)
def read_prescale(self) -> int:
return self._read8(PCA9685_PRESCALE)
def set_pwm(self, ch: int, on: int, off: int):
base = PCA9685_LED0_ON_L + 4 * ch
self._write4(base, on & 0x1FFF, off & 0x1FFF)
def set_pin(self, ch: int, val: int, invert: bool = False):
if val < 0:
val = 0
if val > 4095:
val = 4095
if invert:
if val == 0:
self.set_pwm(ch, 4096, 0) # fully ON
elif val == 4095:
self.set_pwm(ch, 0, 4096) # fully OFF
else:
self.set_pwm(ch, 0, 4095 - val)
else:
if val == 4095:
self.set_pwm(ch, 4096, 0) # fully ON
elif val == 0:
self.set_pwm(ch, 0, 4096) # fully OFF
else:
self.set_pwm(ch, 0, val)
def write_microseconds(self, ch: int, us: int):
prescale = self.read_prescale() + 1
us_per_bit = (1_000_000.0 * prescale) / float(self._oscillator_freq)
ticks = int(us / us_per_bit + 0.5)
if ticks < 0:
ticks = 0
if ticks > 4095:
ticks = 4095
self.set_pwm(ch, 0, ticks)
i2c = I2C(0, scl=Pin(22), sda=Pin(21), freq=400000)
PWM = PCA9685(i2c, addr=0x40)
PWM.begin()
PWM.set_pwm_freq(50)
while True:
PWM.set_pwm(0,1,4095)
PWM.set_pwm(1,1,2000)
PWM.set_pwm(2,1,4095)
PWM.set_pwm(3,1,2000)
PWM.set_pwm(4,1,4095)
PWM.set_pwm(5,1,2000)
PWM.set_pwm(6,1,4095)
PWM.set_pwm(7,1,2000)
PWM.set_pwm(8, 0, int(math_map(90, 0, 180, 140, 680)))
time.sleep(5)
PWM.set_pwm(0,1,2000)
PWM.set_pwm(1,1,2000)
PWM.set_pwm(2,1,2000)
PWM.set_pwm(3,1,2000)
PWM.set_pwm(4,1,2000)
PWM.set_pwm(5,1,2000)
PWM.set_pwm(6,1,2000)
PWM.set_pwm(7,1,2000)
PWM.set_pwm(8, 0, int(math_map(0, 0, 180, 140, 680)))
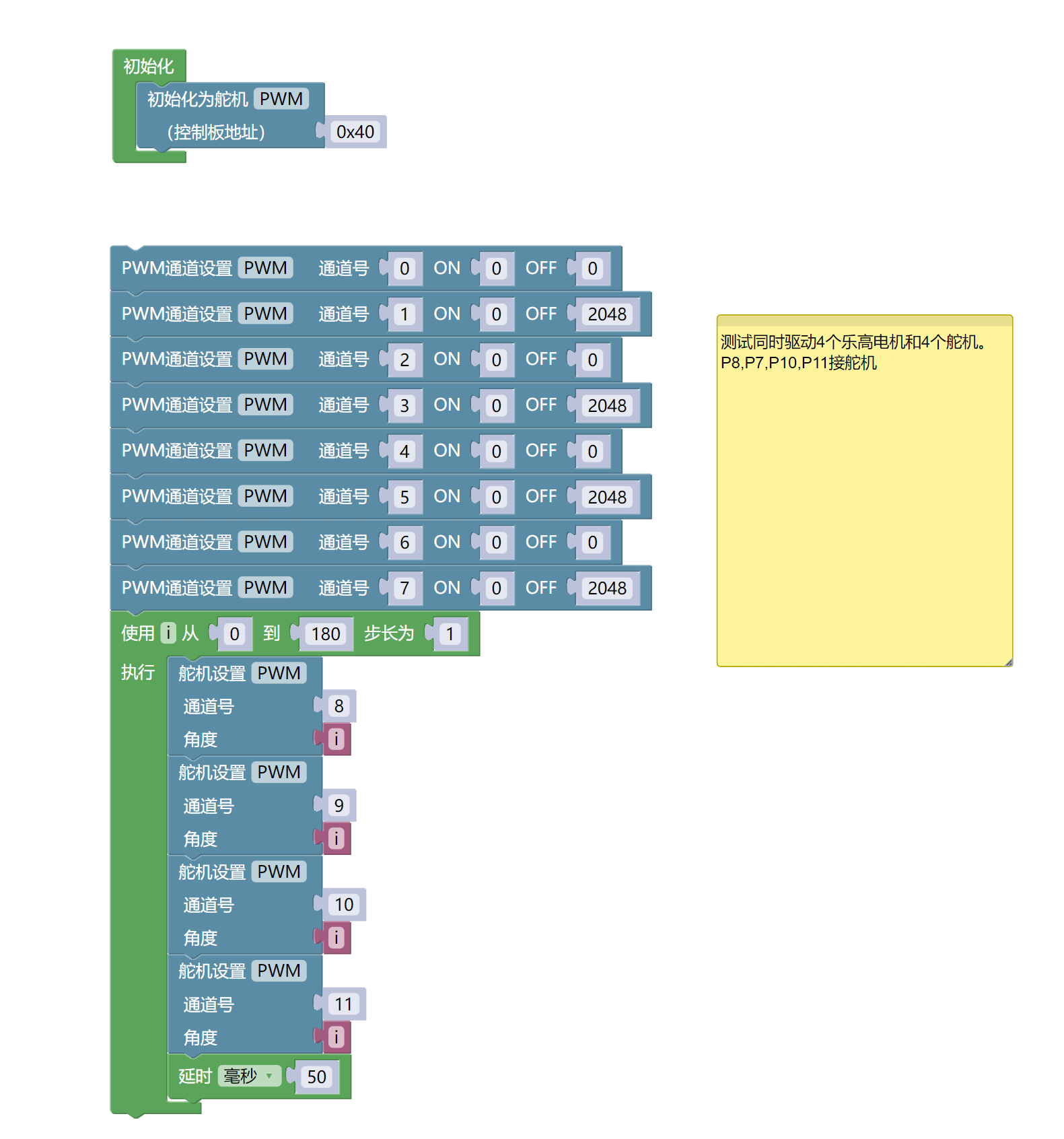
time.sleep(5)7、米思齐 Mixly 示例程序(图形化语言) in Deutsch
Beispielprogramm (UNO-Entwicklerboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE Arduino库文件下载及导入教程:Klicken Sie zum Anzeigen
Beispielprogramm (ESP32-Entwicklungsboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
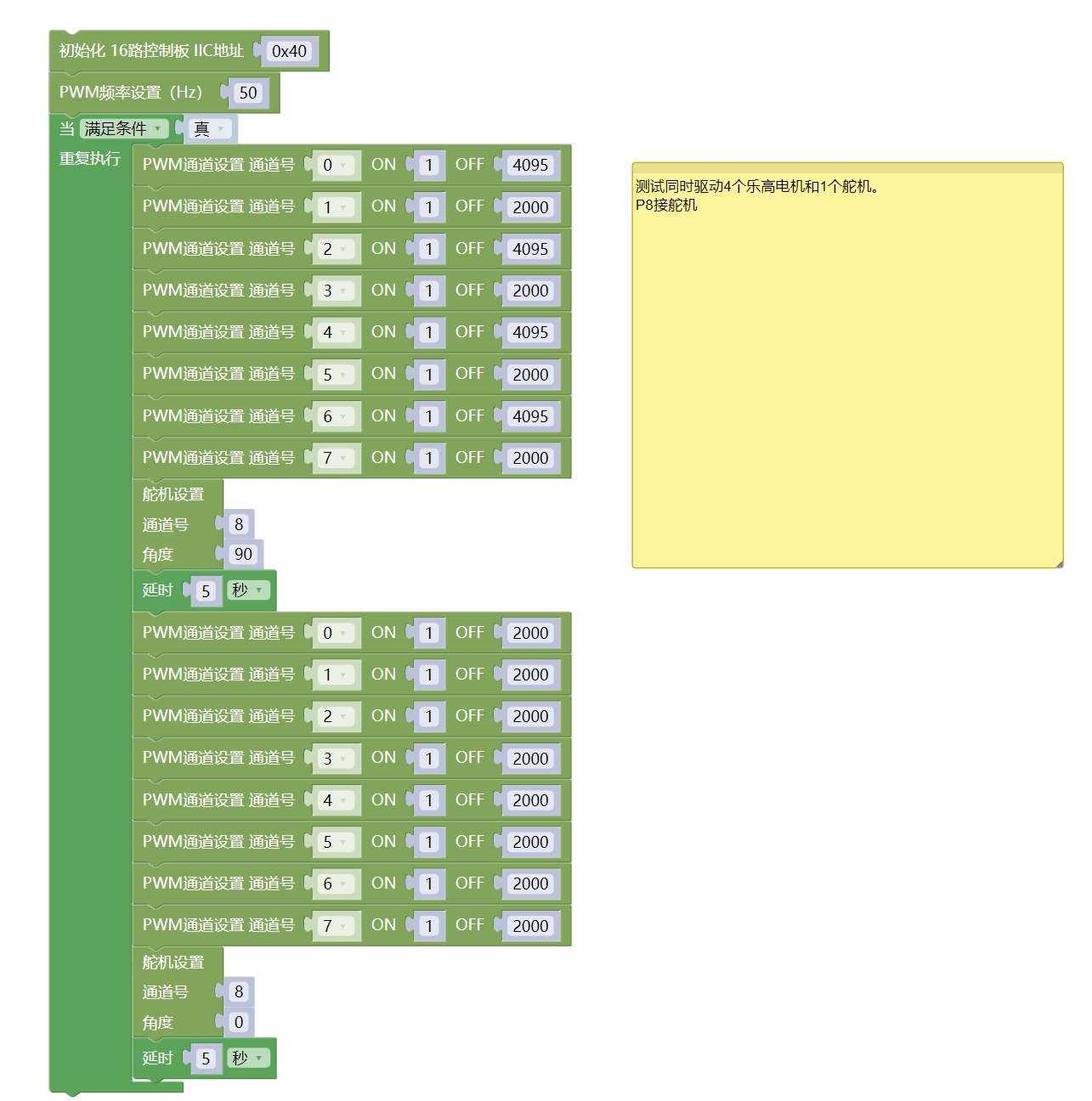
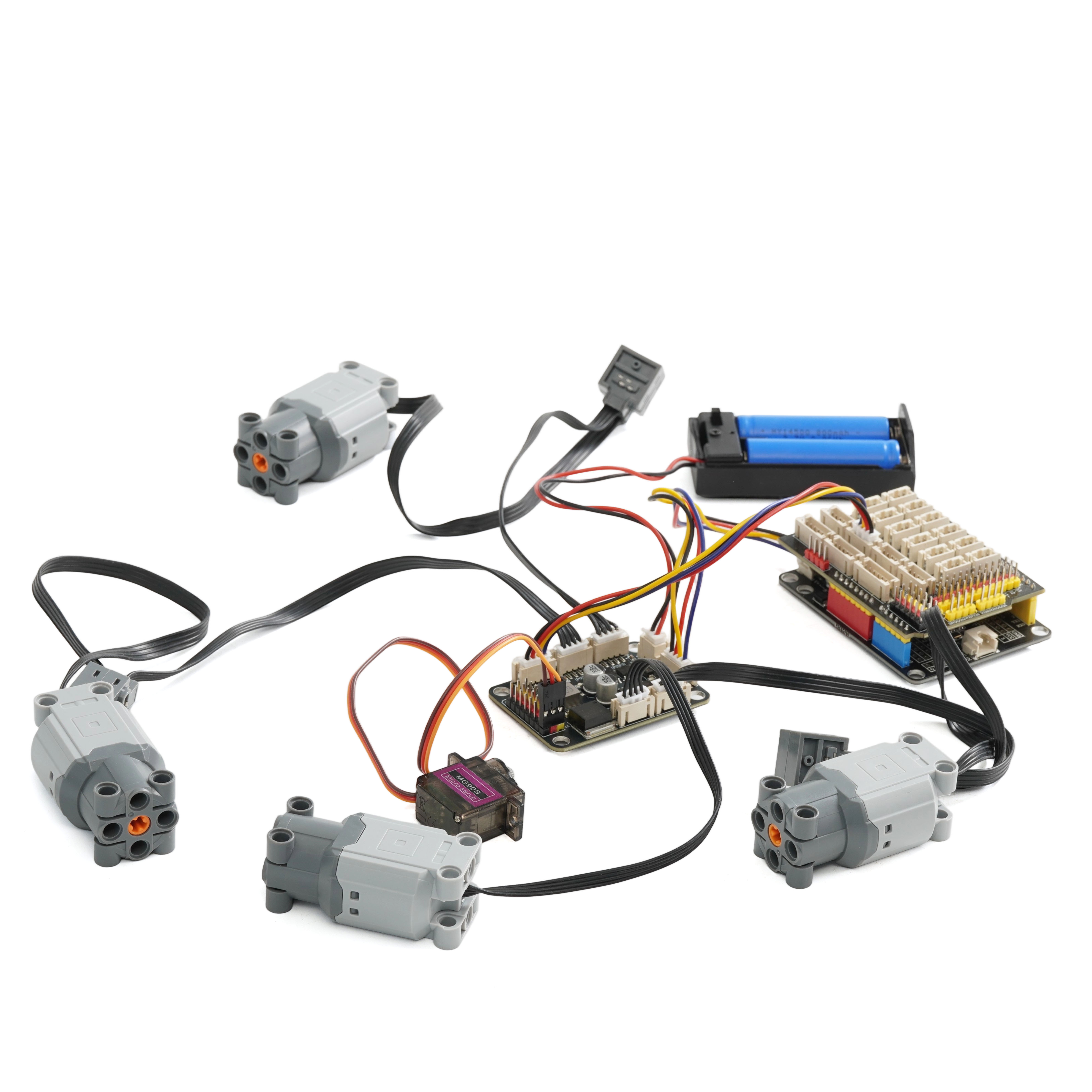
8、Testumgebung Einrichtung
Testumgebung für Arduino UNO einrichten
Vorbereiten Sie die Komponenten:
UNO-R3 Entwicklungsboard *1
UNO-R3 EXP-Erweiterungsplatte *1
USB type-c Datenkabel *1
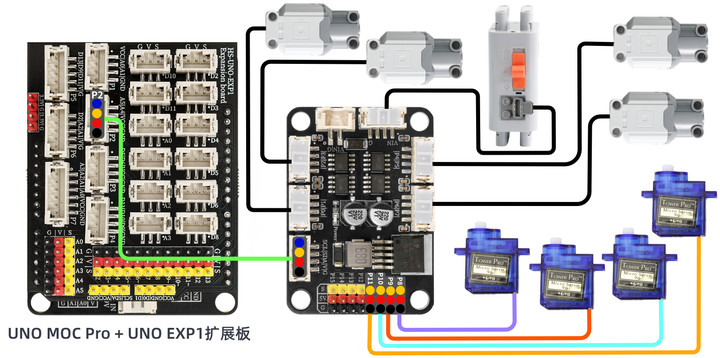
HS-F27 4路电机8路舵机扩展板*1
PH2.0 4P-Doppelkopfsteckerleitung *1
6-9V Akkuhalter*1
Lego Motor*4
Servo*4
Schaltplan der Leitung:
ESP32 Testumgebung einrichten
Vorbereiten Sie die Komponenten:Wird aktualisiert...
Schaltplan der Leitung:Wird aktualisiert...
9、Video-Tutorial
Arduino UNO Videoanleitung:Klicken Sie zum Anzeigen
ESP32 Python Videoanleitung:Klicken Sie zum Anzeigen
10、Testergebnis
Arduino UNO Testergebnis:
Geben Sie den Code ein, schließen Sie die Module an, schalten Sie den Strom ein, dann drehen sich der Motor und der Servo gleichzeitig.